
技(ji)術文章(zhang)
TECHNICAL ARTICLES 當前(qian)位置(zhi):首頁(ye)
當前(qian)位置(zhi):首頁(ye) 技(ji)術文章(zhang)如何(he)選(xuan)擇光(guang)學(xue)延遲(chi)線(xian)
技(ji)術文章(zhang)如何(he)選(xuan)擇光(guang)學(xue)延遲(chi)線(xian)
 更新(xin)時(shi)間(jian):2020-08-17
更新(xin)時(shi)間(jian):2020-08-17 點擊次數(shu):3907
點擊次數(shu):3907
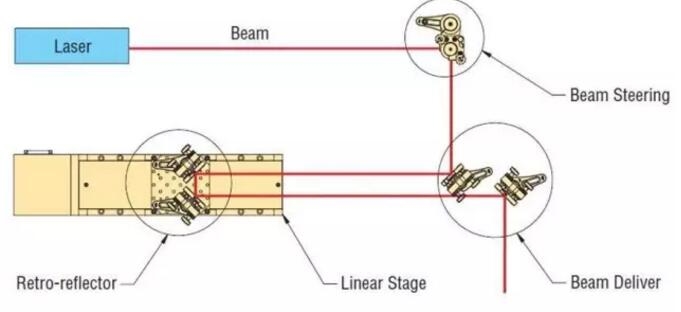
光(guang)學(xue)延遲(chi)線(xian)通(tong)過(guo)掃描(miao)改變(bian)兩束(shu)光(guang)之(zhi)間(jian)的光(guang)程差(cha),在時間(jian)分(fen)辨(bian)超快光(guang)譜學(xue)或分(fen)子動(dong)力學(xue)實(shi)驗(yan)中(zhong)*。典型(xing)的光(guang)學(xue)延遲(chi)線(xian)搭建方(fang)法(fa),是將(jiang)中(zhong)空(kong)回(hui)射鏡(jing)(Retro-reflector)或兩面反射(she)鏡置(zhi)於(yu)直(zhi)線(xian)位移(yi)臺上,如下(xia)圖(tu)所(suo)示(shi)。
位移(yi)臺及(ji)其(qi)驅(qu)動(dong)器(qi)的(de)選(xuan)擇會(hui)對(dui)實(shi)驗(yan)結(jie)果產生至(zhi)關(guan)重(zhong)要(yao)的(de)影響。下(xia)文將(jiang)逐(zhu)壹介(jie)紹相關(guan)的(de)核心(xin)參(can)數(shu),包(bao)括(kuo)時間(jian)延遲(chi)窗(chuang)口(kou)長(chang)度(du)、小運(yun)動(dong)步進、重(zhong)復(fu)定(ding)位精(jing)度、偏(pian)移(yi)量、絕(jue)dui精度(du)和(he)機(ji)械(xie)誤(wu)差(cha)等。
時間(jian)延遲(chi)窗(chuang)口(kou)長(chang)度(du)
這(zhe)是選(xuan)擇直(zhi)線(xian)位移(yi)臺首先要(yao)考(kao)慮的參數(shu)。延(yan)遲(chi)窗(chuang)口(kou)長(chang)度(du)T指光(guang)束(shu)經(jing)過(guo)中(zhong)空(kong)回(hui)射系(xi)統並返(fan)回(hui)所(suo)經(jing)歷(li)的(de)時(shi)間(jian),與位移(yi)臺的行程L直(zhi)接相關(guan)。對(dui)於(yu)采用(yong)單回路的時間(jian)延遲(chi)線(xian)設計,
T = 2*L/c
其(qi)中(zhong)c是真(zhen)空(kong)中(zhong)的光(guang)速。
延遲(chi)步進分(fen)辨(bian)率(lv)
其(qi)次(ci)要(yao)考(kao)慮的是延(yan)遲(chi)步進分(fen)辨(bian)率(lv)(Δτ),它(ta)取(qu)決於(yu)位移(yi)臺的小運(yun)動(dong)增(zeng)量(MIM)
Δτ = 2*MIM/c
重復(fu)定(ding)位精(jing)度

與小運(yun)動(dong)步進同(tong)樣(yang)重要(yao)的(de)是位移(yi)臺的重復(fu)定(ding)位精(jing)度,亦(yi)即(ji)系(xi)統多(duo)次重(zhong)復(fu)到(dao)達(da)同(tong)壹位置(zhi)時(shi)的偏(pian)差(cha)(上圖(tu)紅(hong)色曲線)。典(dian)型(xing)的時間(jian)分(fen)辨(bian)實(shi)驗(yan)中(zhong),直(zhi)線(xian)位移(yi)臺需(xu)要(yao)掃描(miao)特(te)定的距離(由(you)分(fen)析(xi)樣(yang)品(pin)所(suo)需(xu)的時(shi)間(jian)延遲(chi)計(ji)算(suan)得(de)出(chu)),以(yi)記(ji)錄(lu)信(xin)號(hao)隨(sui)時(shi)間(jian)延遲(chi)的(de)變(bian)化(hua)。重(zhong)復(fu)掃描(miao)並取(qu)平均值(zhi)可(ke)以(yi)提(ti)升(sheng)信(xin)號(hao)質(zhi)量並降(jiang)低(di)信(xin)躁(zao)比(bi),因(yin)此(ci)需(xu)要(yao)位移(yi)臺有較(jiao)高的(de)重復(fu)定(ding)位精(jing)度。
偏(pian)移(yi)量
平整度和(he)直(zhi)線(xian)度(du)表(biao)征(zheng)了理(li)想直(zhi)線(xian)運(yun)動(dong)的偏(pian)移(yi)量,分(fen)別(bie)垂(chui)直(zhi)於(yu)水平和(he)豎直(zhi)平面上的運動(dong)。俯仰(Pitch)和(he)偏(pian)擺(Yaw)指圍(wei)繞(rao)運(yun)動(dong)方向(xiang)正交軸(zhou)(y,z)的轉(zhuan)動(dong),而(er)翻滾(gun)(Roll)是圍(wei)繞(rao)運(yun)動(dong)方向(xiang)軸(zhou)的(de)轉(zhuan)動(dong),如下(xia)圖(tu)所(suo)示(shi)。
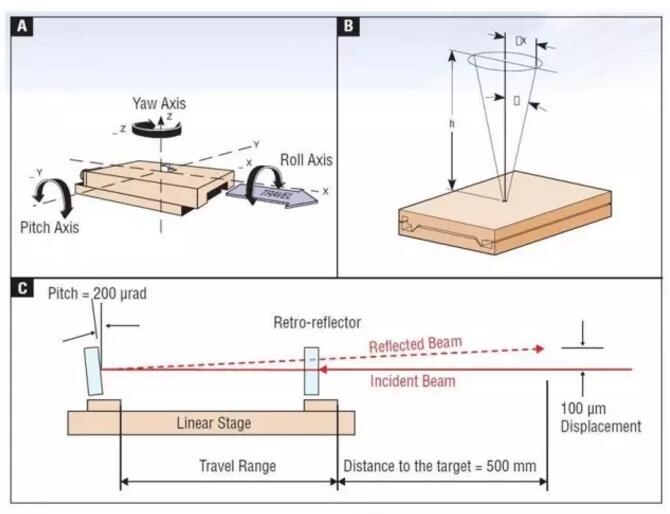
在泵浦(pu)——探測(ce)(Pump-Probe)時間(jian)分(fen)辨(bian)實(shi)驗(yan)中(zhong),泵浦(pu)和(he)探測(ce)光(guang)束(shu)在目標(biao)樣(yang)品(pin)處(chu)實(shi)現空(kong)間(jian)重合(he),而(er)它(ta)們的(de)相對(dui)時(shi)間(jian)延遲(chi)則(ze)通(tong)過(guo)位移(yi)臺的掃描(miao)來(lai)實(shi)現。位移(yi)臺的偏(pian)移(yi),尤其(qi)是角(jiao)方(fang)向(xiang)上的偏(pian)移(yi),會(hui)影響掃描(miao)過(guo)程中(zhong)的空(kong)間(jian)重合(he)度。兩束(shu)光(guang)重合的(de)位置(zhi)距(ju)離延遲(chi)線(xian)越(yue)遠(yuan),位移(yi)臺的俯仰和(he)偏(pian)擺造成(cheng)的空(kong)間(jian)偏(pian)移(yi)量便(bian)越(yue)大。
絕(jue)dui精度(du)
指令(ling)位置(zhi)與(yu)實(shi)際(ji)到(dao)達(da)位置(zhi)的(de)匹配(pei)度(du),即是位移(yi)臺的絕(jue)dui精度(du)。如果絕(jue)dui精度(du)較(jiao)低(di),可(ke)能會(hui)引(yin)起測(ce)試(shi)結(jie)果的畸變,導(dao)致(zhi)壹(yi)些(xie)假的(de)動(dong)力學(xue)特(te)征(zheng)。位移(yi)臺的驅動(dong)方式(shi)(螺(luo)桿(gan)、滾(gun)珠(zhu)、傳動(dong)帶或直(zhi)線(xian)電(dian)機(ji))和(he)反饋(kui)決定(ding)其(qi)絕(jue)dui精度(du)。絲(si)杠和(he)滾(gun)珠(zhu)驅(qu)動(dong)的位移(yi)臺可(ke)以(yi)提(ti)供(gong)良(liang)好(hao)的(de)小運(yun)動(dong)增(zeng)量。但(dan)大部分(fen)情況(kuang)下(xia),它(ta)們都(dou)采用(yong)開(kai)環控制設計,沒(mei)有位置(zhi)反饋(kui),所以(yi)絕(jue)dui精度(du)較(jiao)低(di)。直(zhi)線(xian)電(dian)機(ji)驅(qu)動(dong)的系(xi)統不(bu)同(tong)於(yu)螺(luo)桿(gan)驅(qu)動(dong),不(bu)存(cun)在齒隙(xi)的(de)問(wen)題(ti)。此(ci)外,直(zhi)線(xian)電(dian)機(ji)受(shou)熱膨脹(zhang)的影響較(jiao)小,所(suo)以(yi)絕(jue)dui精度(du)較(jiao)高。
反饋(kui)裝置(zhi)相(xiang)對(dui)於(yu)電(dian)機(ji)的(de)距(ju)離也會(hui)直(zhi)接影響到(dao)運(yun)動(dong)控制系(xi)統的(de)絕(jue)dui精度(du)。
機(ji)械(xie)誤(wu)差(cha)
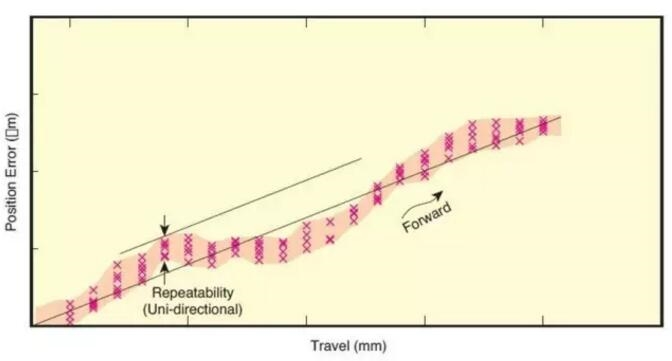
對(dui)於(yu)線性(xing)或單調(tiao)遞(di)增(zeng)的(de)誤差(cha),如余(yu)弦(xian)誤(wu)差(cha)、螺(luo)桿(gan)俯仰誤差(cha)、測(ce)量點(dian)的(de)角(jiao)度(du)偏(pian)差(cha)(阿(e)貝誤(wu)差(cha))以(yi)及(ji)熱膨脹(zhang)效應。它(ta)們可(ke)以(yi)通(tong)過(guo)線(xian)性誤差(cha)補償(chang)來(lai)彌補(bu),如上圖(tu)所(suo)示(shi),通(tong)過(guo)線(xian)性補償(chang)進行糾(jiu)正。
補償(chang)後(hou)精(jing)度=補償(chang)前精(jing)度(du)- (斜(xie)率(lv)x位移(yi))
非(fei)線(xian)性(xing)誤差(cha)則(ze)需(xu)借(jie)助(zhu)激光(guang)幹涉儀(yi)來(lai)進行誤差(cha)補償(chang)。根據(ju)精度需(xu)求(qiu)選(xuan)擇不(bu)同(tong)數(shu)量的(de)點(dian),每(mei)移(yi)動(dong)到(dao)壹(yi)個點記(ji)錄(lu)該(gai)位置(zhi)的(de)誤差(cha),再(zai)通(tong)過(guo)控(kong)制器(qi)計(ji)算,以(yi)進(jin)行誤差(cha)補償(chang)。帶有線性編(bian)碼(ma)器(qi)的(de)位移(yi)臺在經(jing)過(guo)補(bu)償(chang)後(hou),終精度可(ke)達(da)到(dao)數(shu)百納米。
上文列(lie)舉了選(xuan)擇延遲(chi)線(xian)需(xu)要(yao)考(kao)慮的主(zhu)要(yao)因(yin)素(su)。Newport生產(chan)搭建延(yan)遲(chi)線(xian)所(suo)需(xu)要(yao)的(de)多種(zhong)位移(yi)臺、控制器(qi)和(he)回射(she)裝置(zhi),歡(huan)迎(ying)您的(de)咨(zi)詢(xun)。
森(sen)泉(quan)為(wei)您的(de)科研事業添磚加瓦:
1) 激光(guang)控制:激(ji)光(guang)電(dian)流源(yuan)、激(ji)光(guang)器(qi)溫(wen)控器(qi)、激(ji)光(guang)器(qi)控(kong)制、伺服(fu)設備與(yu)系(xi)統等等
2) 探測(ce)器(qi):光(guang)電(dian)探測(ce)器(qi)、單光(guang)子計數(shu)器(qi)、單光(guang)子探測(ce)器(qi)、CCD、光(guang)譜分(fen)析(xi)系(xi)統等等
3) 定位與(yu)加工:納米定位系(xi)統、微(wei)納運(yun)動(dong)系(xi)統、多(duo)維(wei)位移(yi)臺、旋轉臺、微型(xing)操(cao)作器(qi)等等
4) 光(guang)源:半(ban)導體激光(guang)器(qi)、固(gu)體激光(guang)器(qi)、單頻(pin)激光(guang)器(qi)、單縱模激(ji)光(guang)器(qi)、窄(zhai)線寬(kuan)激(ji)光(guang)器(qi)、光(guang)通訊(xun)波(bo)段激(ji)光(guang)器(qi)、CO2激光(guang)器(qi)、中(zhong)紅(hong)外激光(guang)器(qi)、染(ran)料激光(guang)器(qi)、飛(fei)秒超快激光(guang)器(qi)等等
5) 光(guang)機(ji)械(xie)件:用(yong)於(yu)光(guang)路系(xi)統搭建的(de)高(gao)品(pin)質(zhi)無(wu)應(ying)力(li)光(guang)機(ji)械(xie)件,如光(guang)學(xue)調(tiao)整(zheng)架、鏡(jing)架、支(zhi)撐(cheng)桿(gan)、固(gu)定底(di)座(zuo)等等
6) 光(guang)學(xue)平臺:主(zhu)動(dong)隔振(zhen)平臺、氣浮隔振(zhen)臺、實(shi)驗(yan)桌、剛性(xing)工(gong)作臺、面包板、隔振(zhen)、隔(ge)磁、隔聲(sheng)綜(zong)合(he)解決方(fang)案等等
7) 光(guang)學(xue)元件:各類晶(jing)體、光(guang)纖、偏(pian)轉(zhuan)鏡、反射(she)鏡、透射(she)鏡(jing)、半(ban)透半(ban)反鏡(jing)、濾光(guang)片、衰(shuai)減(jian)片、玻(bo)片等等
8) 染料:激光(guang)染料、熒光(guang)染料、光(guang)致(zhi)變(bian)色染料、光(guang)致(zhi)發(fa)光(guang)染料、吸收(shou)染料等等
公司(si)郵(you)箱(xiang): [email protected]
服(fu)務(wu)熱線: 0532-80982936
公司(si)地(di)址(zhi): 山(shan)東(dong)省(sheng)青(qing)島市(shi)黃(huang)島區峨眉(mei)山(shan)路396號(hao)光(guang)谷軟件園57號(hao)樓(lou)501

Copyright © 2026 青(qing)島森(sen)泉(quan)光(guang)電(dian)有限(xian)公司(si) All Rights Reserved
備(bei)案號(hao):魯(lu)ICP備18050584號(hao)-2
技(ji)術支持:化(hua)工(gong)儀(yi)器(qi)網 管(guan)理登錄(lu) sitemap.xml
關(guan)於(yu)我們(men)
公司(si)簡介(jie) 企業文化 聯(lian)系(xi)我們快(kuai)速(su)通道
產(chan)品(pin)中(zhong)心(xin) 新(xin)聞(wen)中(zhong)心(xin) 技(ji)術文章(zhang) 在線留(liu)言推(tui)薦(jian)產品(pin)
DET02AFCThorlabs矽(gui)探測(ce)器(qi) S120CThorlabs標(biao)準(zhun)光(guang)電(dian)二極管(guan)功率探頭(tou) CFC5A-AThorlabs光(guang)纖準直(zhi)器(qi) VISNIR SERIESClydeHSI 高(gao)光(guang)譜成(cheng)像相(xiang)機(ji)